Development of a Novel Umbilical Retraction Mechanism for a Launch Vehicle
Downloads
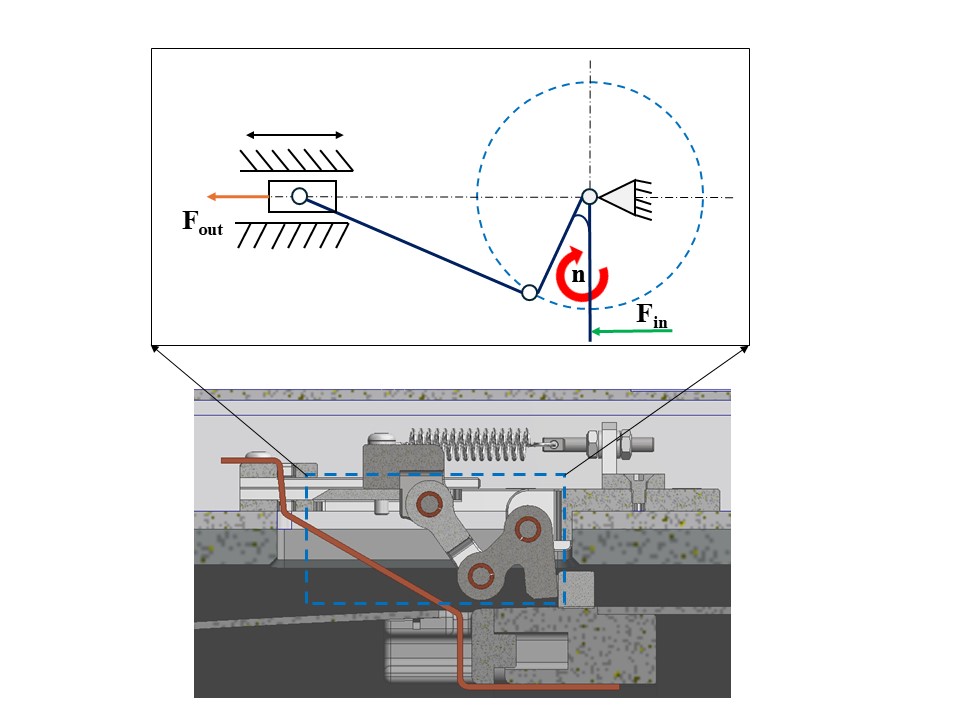
Umbilical or umbilical cable supplies are required for an apparatus, such as a space vehicle, or for a person, a diver, or an astronaut. For launch vehicles, umbilical cables provide essential elements like electrical power, communication, and pressurized gases before liftoff. Ensuring the retraction of these cables is crucial for preventing potential damage during the launch process. This paper addresses a novel mechanism for umbilical retraction in the launch vehicle loading process. This mechanism is based only on the principles that borrow the vehicle’s launch motion to generate a cable-cutting action, and no power is required. The new design of the umbilical retraction device is optimized through simulation and validated by the experiment. The results confirm that the introduced mechanism works effectively with a maximum number of 20 umbilical cables consisting of two forms, namely PVC and metal covers.
Abel, B.A. (1994). Underwater vehicle tether management systems. Oceans Engineering for Today’s Technology and Tomorrow’s Preservation, 495–500, Brest, France.
Alan C. Littlefield and Gregory S. Melton (2000). Design, Development, And Testing of Umbilical System Mechanisms for the X-33 Advanced Technology Demonstrator. Proceedings of the 34th Aerospace Mechanisms Symposium, Goddard Space Flight Center, 1–16.
Chitwood JE., Vail WB. Iii, Skerl DS., Dekle RL., Crossland WG. (2006). High power umbilicals for electric flowline immersion heating of produced hydrocarbons. Patent no. US7032658B2.
Dalby, R. J. (2019). V2 Rocket History. https://v2rockethistory.com.
Department of Energy (2021). Office of Scientific and Technical Information. https://www.science.gov/topicpages/l/launch+umbilical+tower.
Divex Diver Umbilicals. Divex, pp. 1-3 (2020).
Linear spring specifications (2024). Available at Misumi Group: https://us.misumi-ec.com/
Logsdon, J. M. (2024). Launch vehicle, Encyclopedia Britannica. https://www.britannica.com/technology/launch-vehicle
Lu Q, Chen J, Yang Zhixun, Chao YY, Yue Q. (2017). Numerical and Experimental Analysis of Umbilical Cables under Tension. Advanced Composites Letters, 26(2), 56–62. doi:10.1177/096369351702600205
Minor, M. A., Hirschi, C. R. (2007). Automated Tether Management System for Extravehicular Activities. Journal of Field Robotics, 24(4), 311–337.
NASA (2021) Artemis. https://www.nasa.gov/specials/artemis/
NASA Kills ‘Wounded’ Launch System Upgrade at KSC. Florida Today (2002).
Peng C., Yuwang L., Shangkui Y., Jibiao C., Qifeng Z., Yuangui T. (2021). Dynamic characteristics of deep-sea ROV umbilical cables under complex sea conditions. Ocean Engineering, 239, 109854.
Peter I. Macreadie, Dianne L. McLean, Paul G. Thomson, Julian C. Partridge, Daniel O.B. Jones, Andrew R. Gates, Mark C. Benfield, Shaun P. Collin, David J. Booth, Luke L. Smith, Erika Techera, Danielle Skropeta, Tammy Horton, Charitha Pattiaratchi, Todd Bond, Ashley M. Fowler (2018). Eyes in the sea: Unlocking the mysteries of the ocean using industrial, remotely operated vehicles (ROVs). Science of The Total Environment, 634, 1077–1091.
Tao H., Cong D. (2021). Adaptive Impedance Control of a Novel Automated Umbilical System for Propellant Loading. Energies, 14(16), 4900. https://doi.org/10.3390/en14164900
Technical Manual U.S. Navy Diving Umbilical (UBA Mk 20 and Mk 21) Description, materials, and assembly (PDF). SS521-AH-PRO-010 0910-LP-103-2583 Revision 1 (Report). Naval Sea Systems Command (2005).
Tran T. T., Nguyen V. T., Dinh T. P. T., Tran V. M. (2023). Development of a prototype 6 degree of freedom robot arm.Results in Engineering, 18, 101049.
Wang, Z., Lan, D., Wang, T., and Zhang, B. (2020). Design of A Measuring Device and Winch Structure for Detecting the Distance of Two Seabed Pipelines. Marine Science and Engineering, 8(2), 130. https://doi.org/10.3390/jmse8020130
Yan, J., Yang, Z., Guo, H., Ying, X., Hu, H. (2022). Umbilical Cable. In: Cui, W., Fu, S., Hu, Z. (eds) Encyclopedia of Ocean Engineering, 2035–2042, Springer, Singapore. https://doi.org/10.1007/978-981-10-6946-8_150
You, J.-Q., Huang, Y. and Dun, X. (2020). Design and experimental study of automatic docking and undocking robot system for launch vehicle propellant filling, Proceedings of the International Conference on Aerospace System Science and Engineering, 565–578.
Zhou H., Zhang X., Liu J. and Ju Z. (2024). An Active-Passive Compliance Strategy for Robotic Plugging and Unplugging of Rocket Electrical Connectors. IEEE/ASME Transactions on Mechatronics, 1–12, https://doi.org/10.1109/TMECH.2024.3410016
Copyright (c) 2025 Journal of Engineering and Technological Sciences

This work is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License.