An Enhanced Fuzzy Logic-Particle Swarm Optimization Algorithm for the Strategy Control of Self-driving Electric Vehicles
Downloads
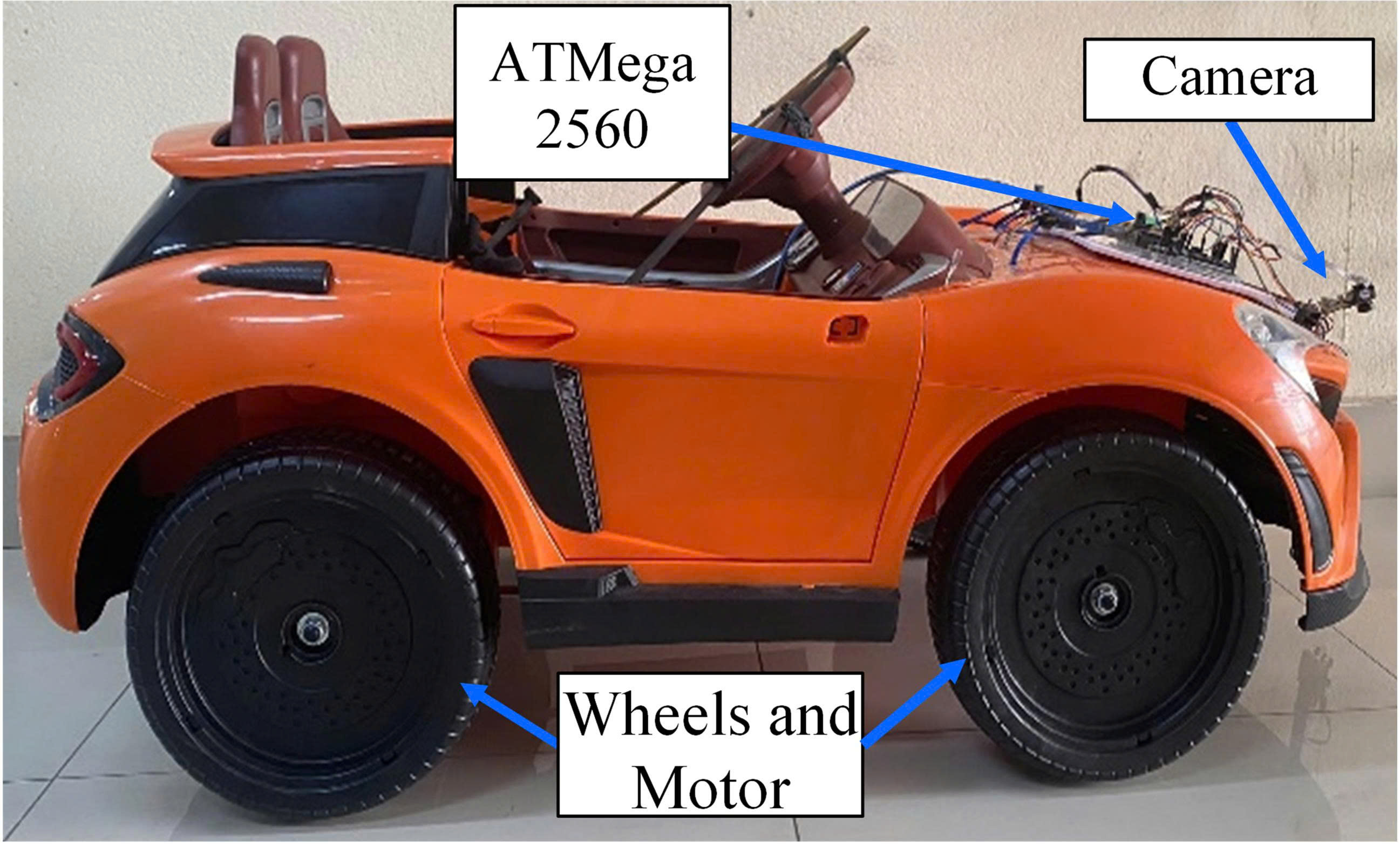
With the current rapid advancement of science and technology, there is an increasing focus on comprehensive research and the development of practical solutions for self-driving electric cars to address challenges, including environmental pollution, renewable energy utilization, emission control, and battery recycling. In this study, automatic direction control is achieved for electric vehicles by implementing line-tracing autonomous vehicles equipped with computer vision-based cameras, utilizing Particle Swarm Optimization (PSO), the Takagi–Sugeno Fuzzy model, and the PID control system. Line-tracing autonomous vehicles are devices capable of recognizing and tracking black or painted lines on the road. The lines are designed to be easily recognizable with a clear contrast, such as a white line on a black background. The autonomous vehicle follows a distinct, marked line to guide its journey. In this study, we integrate computer vision techniques with Particle Swarm Optimization (PSO) and a Takagi–Sugeno fuzzy control system for automatic direction control. Additionally, the speed and turning direction of the electric vehicle are regulated by a controller that combines proportional, integral, and derivative (PID) stages. According to real-world experiments with road-following autonomous vehicles using camera image processing, the highest success rate of 99.8% is achieved when the car employs intelligent algorithms to navigate turns of 10, 20, 30, and 40 degrees. Likewise, tests have demonstrated that the electric vehicle can achieve a perfect success rate of 100% when driving on a straight road.
Abdelghany, M. A., Elnady, A. O., & Ibrahim, S. O. (2023). Optimum PID controller with fuzzy self-tuning for DC servo motor. Journal of Robotics and Control (JRC), 4(4), 500–508. https://doi.org/10.18196/jrc.v4i4.18676
Abdolrasol, M. G., Ayob, A., Mutlag, A. H., & Ustun, T. S. (2023). Optimal fuzzy logic controller based PSO for photovoltaic system. Energy Reports, 9, 427-434. https://doi.org/10.1016/j.egyr.2022.11.039
Amirkhani, A., Shirzadeh, M., & Heydari, J. (2024). Automotive electric power steering control with robust observer based neuroadaptive type-2 radial basis function methodology. IEEE Open Journal of Vehicular Technology, 5, 592-605. https://doi.org/10.1109/OJVT.2024.3383516
Bhargava, A., Suhaib, M., & Singholi, A. S. (2024). A review of recent advances, techniques, and control algorithms for automated guided vehicle systems. Journal of the Brazilian Society of Mechanical Sciences and Engineering, 46(7), 419. https://doi.org/10.1007/s40430-024-04896-w
Brahmi, M., Marai Ghanmi, A., Hamdi, H., Chiheb, B. R., & Zaafouri, A. (2025). An Improved MPPT Scheme for Photovoltaic Systems Using a Novel MRAC-FUZZY Controller. International Journal of Electrical and Computer Engineering Systems, 16(5), 419–429. https://doi.org/10.32985/ijeces.16.5.6
Cao, W., Zhang, P., Mi, Q., Sun, Y., Shi, J., & Liang, W. (2023). Optimization of X-axis servo drive performance using PSO fuzzy control technique for double-axis dicing saw. Scientific Reports, 13(1), 20719. https://doi.org/10.1038/s41598-023-47663-y
Dash, P. M., Baliarsingh, A. K., & Mohapatra, S. K. (2023). Hybrid African vulture optimization algorithm and pattern search tuned fractional order PID controller for AGC of electric vehicles integrated power systems. International Journal on Electrical Engineering and Informatics, 15(2), 259–276. https://doi.org/10.15676/ijeei.2023.15.2.6
Dirik, M. (2022). Type-2 fuzzy logic controller design optimization using the PSO approach for ECG prediction. Journal of fuzzy extension and applications, 3(2), 158-168. https://doi.org/10.22105/jfea.2022.333786.1207
El Hammedi, H., Chrouta, J., Khaterchi, H., & Zaafouri, A. (2023, December). A Comparative Study Between Fuzzy Logic and Particle Swarm Optimization Based on MPPT Algorithms. In 2023 IEEE Third International Conference on Signal, Control and Communication (SCC) (pp. 1-6). IEEE. https://doi.org/10.1109/SCC59637.2023.10527560
Elassy, M., Al-Hattab, M., Takruri, M., & Badawi, S. (2024). Intelligent Transportation Systems for Sustainable Smart Cities. Transportation Engineering, 16, 100252. https://doi.org/10.1016/j.treng.2024.100252
Farkh, R., & Aljaloud, K. (2023). Vision navigation based PID control for line tracking robot. Intelligent Automation & Soft Computing, 35(1), 901-911. https://doi.org/10.32604/iasc.2023.027614
Gajjar, H., Sanyal, S., & Shah, M. (2023). A comprehensive study on lane detecting autonomous car using computer vision. Expert Systems with Applications, 233, 120929. https://doi.org/10.1016/j.eswa.2023.120929
Guo, Z., Yu, K., Jolfaei, A., Bashir, A. K., Almagrabi, A. O., & Kumar, N. (2021). Fuzzy detection system for rumors through explainable adaptive learning. IEEE Transactions on Fuzzy Systems, 29(12), 3650–3664. https://doi.org/10.1109/tfuzz.2021.3052109
Hannan, M. A., Sebastian, G., Al-Shetwi, A. Q., Ker, P. J., Rahman, S. A., Mansor, M., ... & Uddin, M. (2023). Particle swarm optimization algorithm based fuzzy controller for solid-state transfer switch toward fast power transfer and power quality mitigation. IEEE Transactions on Industry Applications, 59(5), 5570–5579. https://doi.org/10.1109/TIA.2023.3289440
Hieu, Le-Dinh.,Temkin, I. O. (2021, June). The application of the fuzzy controller for tension system control of the scraper conveyor in the mines. In IOP Conference Series: Materials Science and Engineering, 1159(1), 012018). IOP Publishing. https://doi.org/10.1088/1757-899X/1159/1/012018
Hijikata, M., Miyagusuku, R., & Ozaki, K. (2022). Wheel arrangement of four omni wheel mobile robot for compactness. Applied sciences, 12(12), 5798. https://doi.org/10.3390/app12125798
Ibrahim, O., Aziz, M. J. A., Ayop, R., Dahiru, A. T., Low, W. Y., Sulaiman, M. H., & Amosa, T. I. (2024). Fuzzy logic-based particle swarm optimization for integrated energy management system considering battery storage degradation. Results in Engineering, 24, 102816. https://doi.org/10.1016/j.rineng.2024.102816
Jang, J. Y., Yoon, S. J., & Lin, C. H. (2023). Automated guided vehicle (AGV) driving system using vision sensor and color code. Electronics, 12(6), 1415. https://doi.org/10.3390/electronics12061415
Li, J., & Miao, M. (2024). Short-term wind power forecasting using interval A2-C1 type-2 TSK FLS method with extended Kalman filter algorithm. Chinese Journal of Electrical Engineering. https://doi.org/10.23919/CJEE.2024.000071
Li, M., Sun, P., Gao, Z., Zhao, X., & Jin, H. (2023, May). Fuzzy-adaptive matrix-based PSO with group learning. In 2023 15th International Conference on Advanced Computational Intelligence (ICACI) (pp. 1-7). IEEE. https://doi.org/10.1109/ICACI58115.2023.10146137
Liu, C. M., & Juang, J. C. (2021). Estimation of lane-level traffic flow using a deep learning technique. Applied Sciences, 11(12), 5619. https://doi.org/10.3390/app11125619
Luo, Z., Tan, Y., Zhu, G., Xia, Y., & Wang, X. (2023). Research on multi-objective flow shop scheduling optimization in supply chain environment based on Fuzzy Relevance Entropy Method. Advances in Mechanical Engineering, 15(12), 16878132231218517. https://doi.org/10.1177/16878132231218517
Maddiralla, V., & Subramanian, S. (2024). Effective lane detection on complex roads with convolutional attention mechanism in autonomous vehicles. Scientific Reports, 14(1), 19193. https://doi.org/10.1038/s41598-024-70116-z
Mohamed, S. A., Anwer, N., & Mahmoud, M. M. (2025). Solving optimal power flow problem for IEEE-30 bus system using a developed particle swarm optimization method: towards fuel cost minimization. International Journal of Modelling and Simulation, 45(1), 307–320. https://doi.org/10.1080/02286203.2023.2201043
Morales-Castañeda, B., Oliva, D., Navarro, M. A., Ramos-Michel, A., Valdivia, A., Casas-Ordaz, A., ... & Mousavirad, S. J. (2023, July). Improving the convergence of the PSO algorithm with a stagnation variable and fuzzy logic. In 2023 IEEE Congress on Evolutionary Computation (CEC) (pp. 1-8). IEEE. https://doi.org/10.1109/CEC53210.2023.10254003
Neumann, T. (2024). Analysis of Advanced Driver-Assistance Systems for Safe and Comfortable Driving of Motor Vehicles. Sensors, 24(19), 6223–6223. https://doi.org/10.3390/s24196223
Ntakolia, C., Kladis, G. P., & Lyridis, D. V. (2023). A fuzzy logic approach of pareto optimality for multi-objective path planning in case of unmanned surface vehicle. Journal of Intelligent & Robotic Systems, 109(1), 21. https://doi.org/10.1007/s10846-023-01945-9
Oladipo, S., Sun, Y., & Adeleke, O. (2023). An Improved Particle Swarm Optimization and Adaptive Neuro‐Fuzzy Inference System for Predicting the Energy Consumption of University Residence. International Transactions on Electrical Energy Systems, 2023(1), 8508800. https://doi.org/10.1155/2023/8508800
Pérez-Juárez, J. G., García-Martínez, J. R., Medina Santiago, A., Cruz-Miguel, E. E., Olmedo-García, L. F., Barra-Vázquez, O. A., & Rojas-Hernández, M. A. (2025). Kinematic Fuzzy Logic-Based Controller for Trajectory Tracking of Wheeled Mobile Robots in Virtual Environments. Symmetry, 17(2), 301. https://doi.org/10.3390/sym17020301
Pitropov, M., Garcia, D., Rebello, J., Smart, M., Wang, C., Czarnecki, K., & Waslander, S. (2021). Canadian Adverse Driving Conditions Dataset. The International Journal of Robotics Research, 40(4-5), 681–690. https://doi.org/10.1177/0278364920979368
Qiu, C., Tang, H., Yang, Y., Wan, X., Xu, X., Lin, S., ... & Zha, C. (2024). Machine vision-based autonomous road hazard avoidance system for self-driving vehicles. Scientific Reports, 14(1), 12178. https://doi.org/10.1038/s41598-024-62629-4
Regaya, C. B., Farhani, F., Zaafouri, A., & Chaari, A. (2021). Adaptive proportional-integral fuzzy logic controller of electric motor drive. Engineering Review: Međunarodni časopis namijenjen publiciranju originalnih istraživanja s aspekta analize konstrukcija, materijala i novih tehnologija u području strojarstva, brodogradnje, temeljnih tehničkih znanosti, elektrotehnike, računarstva i građevinarstva, 41(2), 26–40. https://doi.org/10.30765/er.1446
Sathish Kumar, A., Naveen, S., Vijayakumar, R., Suresh, V., Asary, A. R., Madhu, S., & Palani, K. (2023). An intelligent fuzzy-particle swarm optimization supervisory-based control of robot manipulator for industrial welding applications. Scientific Reports, 13(1), 8253. https://doi.org/10.1038/s41598-023-35189-2
Siddikov, I., Porubay, O., & Rakhimov, T. (2024). Synthesis of the neuro-fuzzy regulator with genetic algorithm. International Journal of Electrical & Computer Engineering (2088-8708), 14(1), 184–191. https://doi.org/10.11591/ijece.v14i1.pp184-191
Souza, B. J., da Costa, G. K., Szejka, A. L., Freire, R. Z., & Gonzalez, G. V. (2024). A deep learning-based approach for axle counter in free-flow tolling systems. Scientific reports, 14(1), 3400. https://doi.org/10.1038/s41598-024-53749-y
Sultana, S., Ahmed, B., Paul, M., Islam, M. R., & Ahmad, S. (2023). Vision-based robust lane detection and tracking in challenging conditions. IEEE Access, 11, 67938–67955. https://doi.org/10.1109/ACCESS.2023.3292128
Surono, S., Goh, K. W., Onn, C. W., Nurraihan, A., Siregar, N. S., Saeid, A. B., & Wijaya, T. T. (2022). Optimization of Markov weighted fuzzy time series forecasting using genetic algorithm (GA) and particle swarm optimization (PSO). Emerging Science Journal, 6(6), 1375–1393. https://doi.org/10.28991/ESJ-2022-06-06-010
Swethamarai, P., Lakshmi, P., & Gokul Prassad, S. (2022). Whale-optimized fuzzy-fractional order controller-based automobile suspension model. Engineering Optimization, 54(7), 1110–1130. https://doi.org/10.1080/0305215X.2021.1913735
Vivacqua, R. P. D., Bertozzi, M., Cerri, P., Martins, F. N., & Vassallo, R. F. (2017). Self-Localization Based on Visual Lane Marking Maps: An Accurate Low-Cost Approach for Autonomous Driving. IEEE Transactions on Intelligent Transportation Systems, 19(2), 582–597. https://doi.org/10.1109/tits.2017.2752461
Wang, C. (2023). A distributed particle-swarm-optimization-based fuzzy clustering protocol for wireless sensor networks. Sensors, 23(15), 6699. https://doi.org/10.3390/s23156699
Wang, H. (2018). Control system design for autonomous vehicle path following and collision avoidance (Doctoral dissertation, The Ohio State University).
Xia, X., Song, H., Zhang, Y., Gui, L., Xu, X., Li, K., & Li, Y. (2022). A particle swarm optimization with adaptive learning weights tuned by a multiple-input multiple-output fuzzy logic controller. IEEE Transactions on Fuzzy Systems, 31(7), 2464-2478. https://doi.org/10.1109/TFUZZ.2022.3227464
Хиеу, Л. Д., & Агабубаев, А. (2022). РАЗРАБОТКА МОДЕЛИ УПРАВЛЕНИЯ РЕЖИМАМИ РАБОТЫ ПРИВОДОВ СКРЕБКОВОГО КОНВЕЙЕРА НА ОСНОВЕ МЯГКИХ ВЫЧИСЛЕНИЙ. Горный информационно-аналитический бюллетень (научно-технический журнал), (3), 130–142. https://doi.org/10.25018/0236_1493_2022_3_0_130
Yao, & Tian. (2019). A Model Predictive Controller with Longitudinal Speed Compensation for Autonomous Vehicle Path Tracking. Applied Sciences, 9(22), 4739. https://doi.org/10.3390/app9224739
Yao, Y. D., Li, H. C., Zeng, Z. B., Wang, C., & Zhang, Y. Q. (2024). Clustering routing protocol based on tuna swarm optimization and fuzzy control theory in wireless sensor networks. IEEE Sensors Journal, 24(10), 17102–17115. https://doi.org/10.1109/JSEN.2024.3385450
Zakaria, N. J., Shapiai, M. I., Abd Ghani, R., Yassin, M. N. M., Ibrahim, M. Z., & Wahid, N. (2023). Lane detection in autonomous vehicles: A systematic review. IEEE access, 11, 3729–3765. https://doi.org/10.1109/ACCESS.2023.3234442
Zhang, Y., Carballo, A., Yang, H., & Takeda, K. (2023). Perception and sensing for autonomous vehicles under adverse weather conditions: A survey. ISPRS Journal of Photogrammetry and Remote Sensing, 196(196), 146–177. https://doi.org/10.1016/j.isprsjprs.2022.12.021
Copyright (c) 2026 Journal of Engineering and Technological Sciences

This work is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License.